

Hyperspectral Imaging
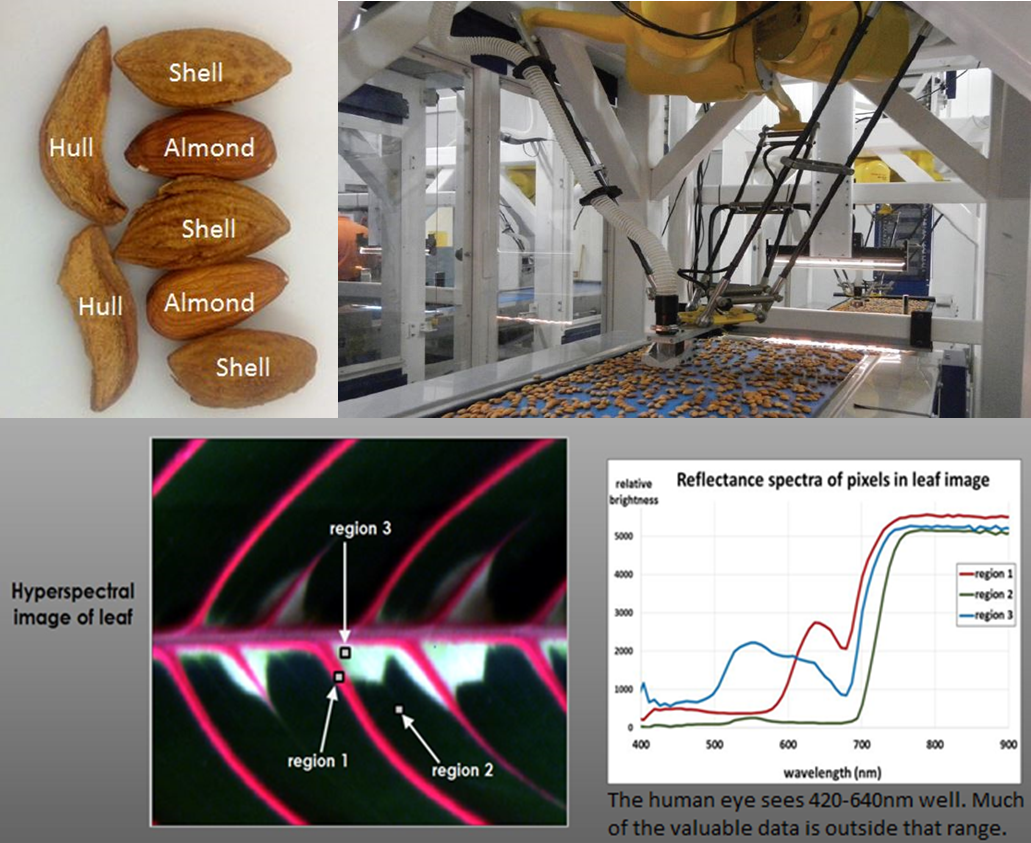
Hyperspectral imaging, like other spectral imaging, collects and processes information from across the electromagnetic spectrum. Such as the human eye sees visible light in three bands (red, green, and blue), spectral imaging divides the spectrum into many more bands. This technique of dividing images into bands can be extended beyond the visible. [wiki]
Hyperspectral Imaging Solutions
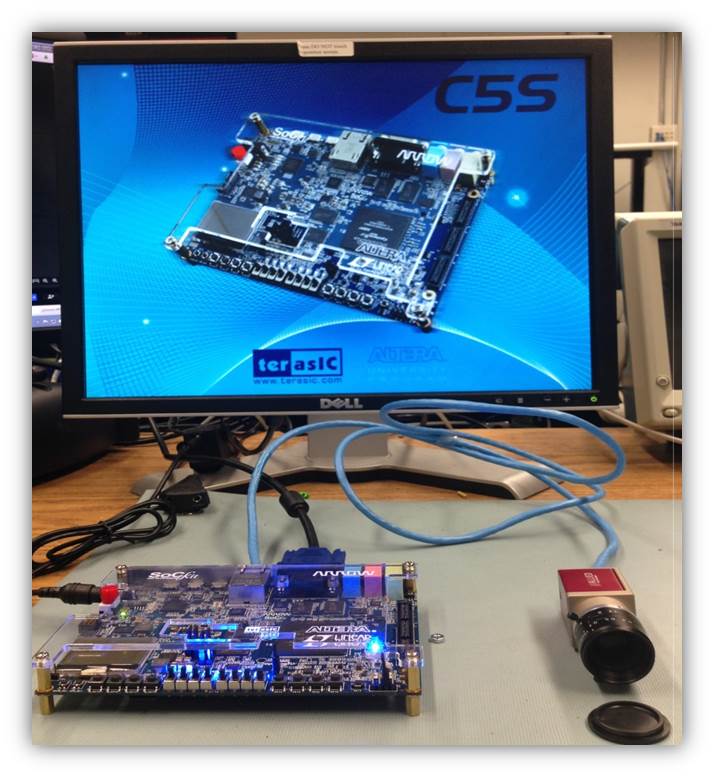
1. Hyper-spectral Camera
2. GigE – Camera can output only with gigabit Ethernet. Gigabit Ethernet can handle up to 125MB/s of data. Our camera can only output up to ~50MB/s.
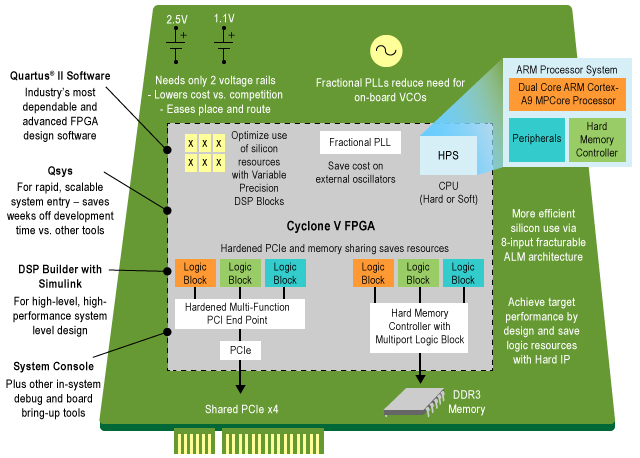
3. FPGA – Data mover (in our system) and manipulator (in the future system)
4. Display – HDMI input display monitor
SoC toolkit integration for REAL Time Operation

Current system uses a Computer – Very hard to make Real Time. New system will use an FPGA, which will be able to operate Real Time. Moreover, Computers lag and things get delayed. Here, FPGAs have fixed latencies so processing time is guaranteed. The new system will have dedicated logic such that the data flow rate throughout the system will be constant. We can guarantee that our robot will get commands within a set period of time so that it will eject the right almonds.