Our submarine is a constantly evolving machine, the specifications below represent its current state.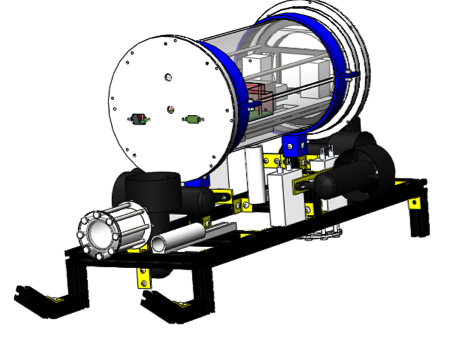
Mechanical Specifications
| Frame |
T-slotted Aluminum |
| Hull |
Polycarbonate tubing, with aluminum flanges and endcaps |
| Thrusters |
Seabotix BTD150 Thrusters |
Electrical Specifications
| Batteries |
Lithium-ion 18.5V 10,000mAh battery array |
| Thrusters |
Seabotix BTD150 Thrusters |
| Power Supply |
M4-ATX 250w DC-DC automotive power supply |
| Computer |
Mini-ITX Motherboard with Intel Core i5 Mobile CPU |
| Arduino |
Arduino Mega 2560 Board |
| Motor Controllers |
Pololu 21v3 Digital PID Motor Controllers |
| IMU |
Sparton GEDC-6 AHRS |
| Camera |
Point Gray Flea3 camera with Theia SY110M Wide Angle lens |
| Wet Connects |
SeaCon Micro Wet-Con and Samtec AccliMate |
Software Specifications
| Languages |
C#, Arduino |
| Frameworks |
Microsoft Robotics Development Studio |
| Vision Software |
RoboRealm |