MSU RoboSub 2015 MSU RoboSub 2015
MSU RoboSub 2015 MSU RoboSub 2015The AUVSI RoboSub
competition is a yearly competition where universities from all over the world
create Autonomous Underwater Vehicles (AUVs) that are programmed to complete a
predetermined set of tasks. A 15 minute run gives the AUV a chance to
complete as many tasks as possible. Orange tape at the bottom of the pool helps
guide the sub between each task. Points will be awarded by a set of
judges, depending on the degree of completion of each task. The official
rulebook for the competition is distributed to teams about six months before
the competition and includes an explanation of each task. This rulebook
also states requirements for weight and allowable dimensions for the sub.
The sub is not allowed to touch the surface of the pool at all during the
competition. Breaking any of these rules will result in disqualification
from the competition.
Location
The competition takes
place at SSC Pacific TRANSDEC in San Diego. This is the 18th
international competition. The competition is to be held July 20 - July
26 this year. It should be noted that the dates haven’t been announced for the
2016 competition, when our additions to the sub will be first used.
Team Tasks and Objectives:
| Torpedo Launcher | Marker Dropper | Pinger Locator |
| Shoot torpedo through a recognised square hole | Successfully drop "markers" into a 1' by 2' bin | Find a zero heading towards pinger, stop and surface above pinger |
| Design compatible with existing and future framerwork, low weight, low cost, low power use and simple matinenance | ||
| Research and finalize design, order parts | Prototype demonstration for CSPD | |
| Create testing equipment, machine task part, assemble and attach to sub, program components, test and fix errors | ||
Josh Robinson

Josh is a senior in Electrical Engineering and is in his
first semester of Capstone. He is originally from Gillette, Wyoming and was
drawn to Bozeman, Montana because of MSU’s outstanding Engineering Department
as well as the natural beauty of the surrounding geographic aspects. Josh is
enthusiastic about the future of Electrical Engineering and is primarily
interested in Power and the progression towards the Smart Grid
Kyle Welliever

Kyle
is originally from Billings, MT and is currently a senior majoring in
Mechanical Engineering and minoring in Aerospace. He enjoys
anything and everything Bozeman. His favorite activities are
skiing, fishing, mountain biking, camping, floating, and frisbee with
friends. He will be working as a feild engineer intern for Kiewit
in Wyoming this summer and plans to find a job in Montana upon
graduating in December.
Nathan Althoff

Nathan
is originally from Billings, MT and is currently a senior in Mechanical
Engineering. His favorite thing to do is explore the outdoors. More
specifically, He enjoys camping, hiking, biking, skiing, and fishing. He
will be working as a technician at ExxonMobil Pipeline and taking online
classes over the summer. After finishing Capstone II next semester, he
will receive his degree and will be promoted to an engineering position with
ExxonMobil.
Rohan Khante

Rohan is an Computer Engineering senior. He enjoys activites like soccer, coding, video games and swimming
Advisor
Todd J.
Kaiser, PH.D
Associate
Professor
Electrical
& Computer Engineering
Sponsor

NAVSEA Keyport Undersea Warfare Division
Dylan
Solomon
Test
Vehicle Systems Engineer
UUV
Production Engineering Branch
Libby
Miller
ASW
Training Target
Technical
Project Manager
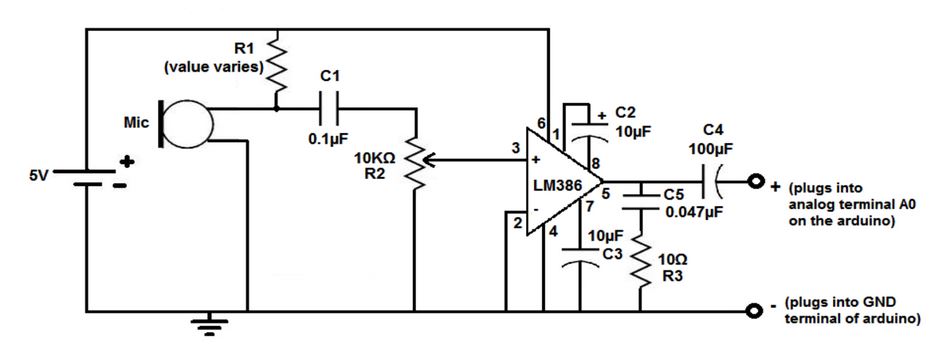

The above two images show the signal generated when the triangular framework was in the smallest configuration. The next two images show the signal when the trianglular framework was in the largest configuration allowed at competion (3 Feet). An input 1kHz sine wave was played through a speaker directly in front of the configuration as shown. Notice the differences in amplitude between the small and large configurations.


Pinger Locator-Recognize, move toward, and surface above pinger signal
Use pre-amplified, high sensitivity hydrophones, use amplitude to detect signal, orient in equilateral triangle
Marker Dropper-Release marker without getting stuck
No moving parts, air driven, accounts for declining magnet
force due to long term deterioration (Plastic Spacers), no complex 3-D printed parts
Torpedo Launcher-Launch torpedo at least 5 feet
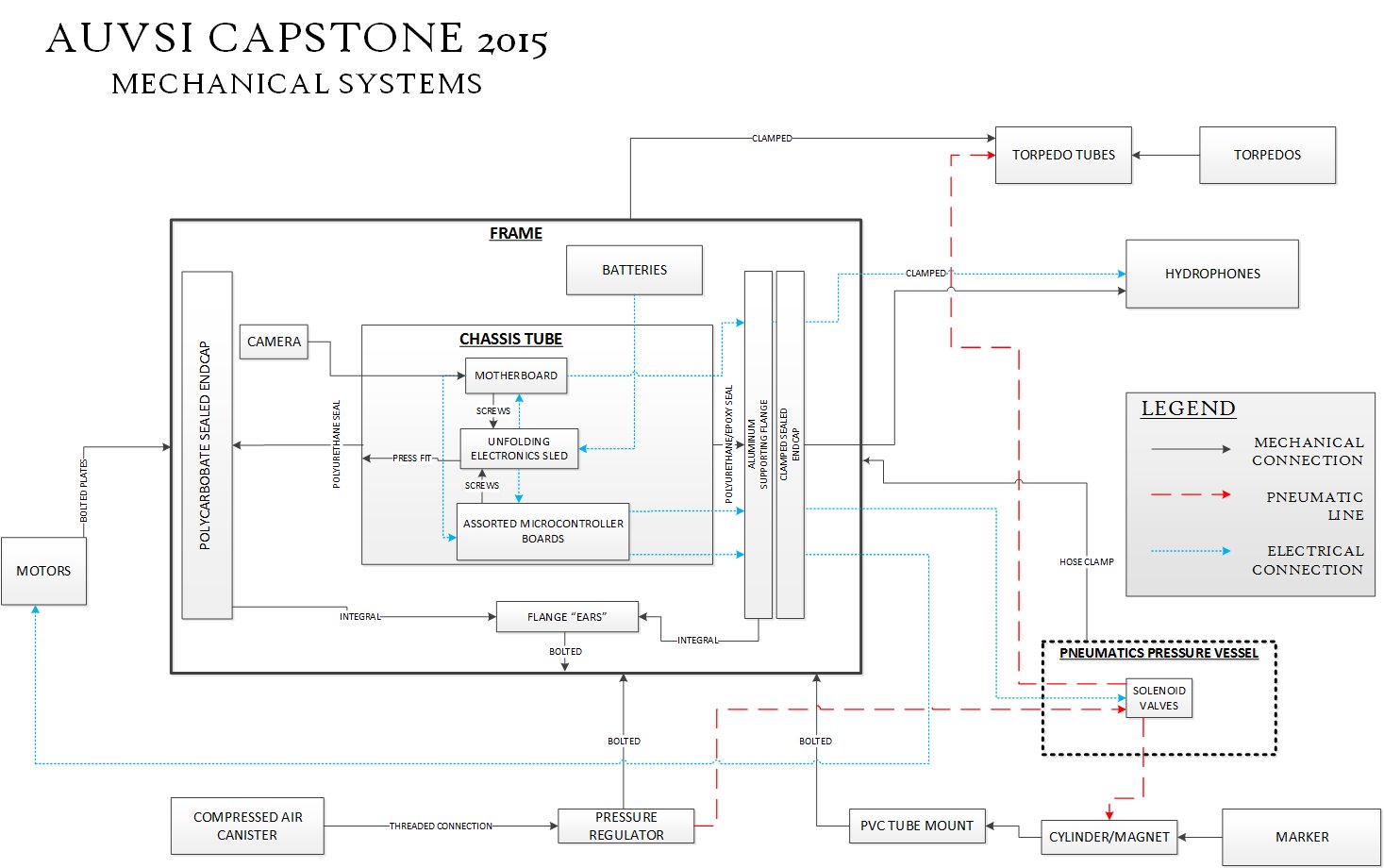
Pneumatics
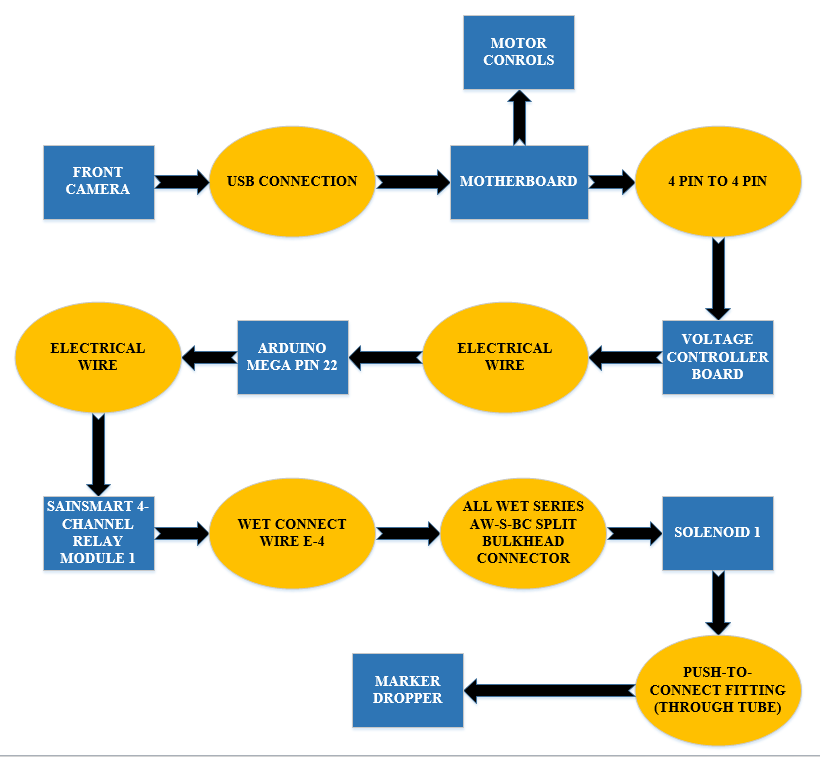
Marker Dropper
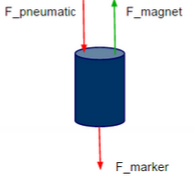

Block Diagram of Marker Dropper subsystem
Improvements from Old design
No moving parts
Manufacture and testing
Parts can very easily be purchased or manufactured
Can be tested standalone to confirm force calculations
Pinger
Locator

*Pinger
Frequency Emitted 25kHz - 40kHz ***Valid*** ( Hydrophone Frequency Range as
seen in table)
*Pinger
Pulse Length 4ms ( Therefore Signal variable TAU is 250 Hz)
*Hydrophone is Omnidirectional (detects from several angles)

Torpedo
Launcher





Improvements from Old design
Steel support spacer to prevent bending of inner tube and improve accuracy
Larger diameter inner tube to increase force exterted on torpedo from 1.1 lbs to 4.7 lbs
Stainless steel inner tube is less prone to bending than previous aluminum tube
Manufacture and testing